Gyroplanes are quite reliable, however emergencies do occur, whether a result of mechanical failure or pilot error. By having a thorough knowledge of the gyroplane and its systems, you will be able to more readily handle the situation. In addition, by knowing the conditions which can lead to an emergency, many potential accidents can be avoided.
Aborted takeoff
Prior to every takeoff, consideration must be given to a course of action should the takeoff become undesirable or unsafe. Mechanical failures, obstructions on the takeoff surface, and changing weather conditions are all factors that could compromise the safety of a take- off and constitute a reason to abort. The decision to abort a takeoff should be definitive and made as soon as an unsafe condition is recognized. By initiating the abort procedures early, more time and distance will be available to bring the gyroplane to a stop. A late decision to abort, or waiting to see if it will be necessary to abort, can result in a dangerous situation with little time to respond and very few options available.
When initiating the abort sequence prior to the gyroplane leaving the surface, the procedure is quite simple. Reduce the throttle to idle and allow the gyroplane to decelerate, while slowly applying aft cyclic for aerodynamic braking. This technique pro- vides the most effective braking and slows the aircraft very quickly. If the gyroplane has left the surface when the decision to abort is made, reduce the throttle until an appropriate descent rate is achieved. Once contact with the surface is made, reduce the throttle to idle and apply aerodynamic braking as before. The wheel brakes, if the gyroplane is so equipped, may be applied, as necessary, to assist in slowing the aircraft.
ACCELERATE/STOP DISTANCE
An accelerate/stop distance is the length of ground roll an aircraft would require to accelerate to takeoff speed and, assuming a decision to abort the takeoff is made, bring the aircraft safely to a stop. This value changes for a given aircraft based on atmospheric conditions, the takeoff surface, aircraft weight, and other factors affecting performance. Knowing the accelerate/stop value for your gyroplane can be helpful in planning a safe takeoff, but having this distance available does not necessarily guarantee a safe aborted takeoff is possible for every situation. If the decision to abort is made after liftoff, for example, the gyroplane will require consid- erably more distance to stop than the accelerate/stop figure, which only considers the ground roll require- ment. Planning a course of action for an abort decision at various stages of the takeoff is the best way to ensure the gyroplane can be brought safely to a stop should the need arise.
For a gyroplane without a flight manual or other published performance data, the accelerate/stop distance can be reasonably estimated once you are familiar with the performance and takeoff characteristics of the air- craft. For a more accurate figure, you can accelerate the gyroplane to takeoff speed, then slow to a stop, and note the distance used. Doing this several times gives you an average accelerate/stop distance. When performance charts for the aircraft are available, as in the flight manual of a certificated gyroplane, accurate accelerate/stop distances under various conditions can be determined by referring to the ground roll information contained in the charts.
Lift-off at low airspeed and high angle of attack
Because of ground effect, your gyroplane might be able to become airborne at an airspeed less than minimum level flight speed. In this situation, the gyroplane is fly- ing well behind the power curve and at such a high angle of attack that unless a correction is made, there will be little or no acceleration toward best climb speed. This condition is often encountered in gyroplanes capable of jump takeoffs. Jumping without sufficient rotor inertia to allow enough time to acceler- ate through minimum level flight speed, usually results in your gyroplane touching down after liftoff. If you do touch down after performing a jump takeoff, you should abort the takeoff.
During a rolling takeoff, if the gyroplane is forced into the air too early, you could get into the same situation. It is important to recognize this situation and take immediate corrective action. You can either abort the takeoff, if enough runway exists, or lower the nose and accelerate to the best climb speed. If you choose to con- tinue the takeoff, verify that full power is applied, then, slowly lower the nose, making sure the gyroplane does not contact the surface. While in ground effect, acceler- ate to the best climb speed. Then, adjust the nose pitch attitude to maintain that airspeed.
COMMON ERRORS
The following errors might occur when practicing a lift-off at a low airspeed.
- Failure to check rotor for proper operation, track, and r.p.m. prior to initiating takeoff.
- Use of a power setting that does not simulate a “behind the power curve” situation.
- Poor directional control.
- Rotation at a speed that is inappropriate for the maneuver.
- Poor judgement in determining whether to abort or continue takeoff.
- Failure to establish and maintain proper climb attitude and airspeed, if takeoff is continued.
- Not maintaining the desired ground track during the climb.
Pilot-induced oscillation (pio)
Pilot-induced oscillation, sometimes referred to as porpoising, is an unintentional up-and-down oscillation of the gyroplane accompanied with alternating climbs and descents of the aircraft. PIO is often the result of an inexperienced pilot overcontrolling the gyroplane, but this condition can also be induced by gusty wind conditions. While this condition is usually thought of as a longitudinal problem, it can also happen laterally.
As with most other rotor-wing aircraft, gyroplanes experience a slight delay between control input and the reaction of the aircraft. This delay may cause an inex- perienced pilot to apply more control input than required, causing a greater aircraft response than was desired. Once the error has been recognized, opposite control input is applied to correct the flight attitude. Because of the nature of the delay in aircraft response, it is possible for the corrections to be out of synchro- nization with the movements of the aircraft and aggra- vate the undesired changes in attitude. The result is PIO, or unintentional oscillations that can grow rapidly in magnitude. [Figure 21-1]
In gyroplanes with an open cockpit and limited flight instruments, it can be difficult for an inexperienced pilot to recognize a level flight attitude due to the lack of visual references. As a result, PIO can develop as the pilot chases a level flight attitude and introduces climb- ing and descending oscillations. PIO can also develop if a wind gust displaces the aircraft, and the control inputs made to correct the attitude are out of phase with the aircraft movements. Because the rotor disc angle decreases at higher speeds and cyclic control becomes more sensitive, PIO is more likely to occur and can be more pronounced at high airspeeds. To minimize the possibility of PIO, avoid high-speed flight in gusty conditions, and make only small control inputs. After making a control input, wait briefly and observe the reaction of the aircraft before making another input. If PIO is encountered, reduce power and place the cyclic in the position for a normal climb. Once the oscillations have stopped, slowly return the throttle and cyclic to their normal positions. The likelihood of encountering PIO decreases greatly as experience is gained, and the ability to subconsciously anticipate the reactions of the gyroplane to control inputs is developed.
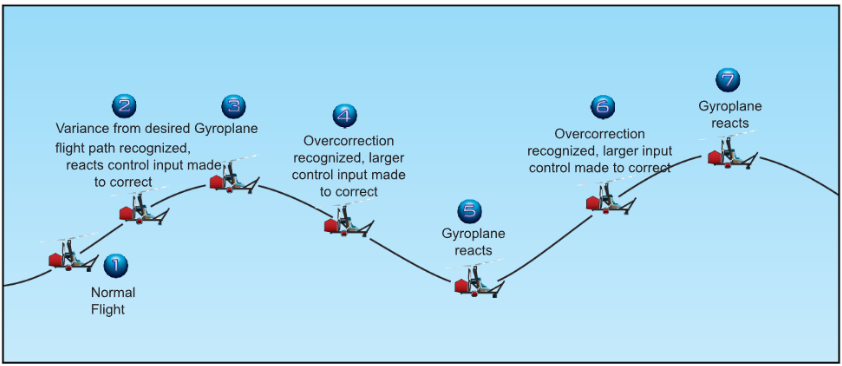
Figure 21-1. Pilot-induced oscillation can result if the gyroplane’s reactions to control inputs are not anticipated and become out of phase.
Buntover (power pushover)
As you learned in Chapter 16—Gyroplane Aerodynamics, the stability of a gyroplane is greatly influenced by rotor force. If rotor force is rapidly removed, some gyroplanes have a tendency to pitch forward abruptly. This is often referred to as a forward tumble, buntover, or power pushover. Removing the rotor force is often referred to as unloading the rotor, and can occur if pilot-induced oscillations become excessive, if extremely turbulent conditions are encountered, or the nose of the gyroplane is pushed for- ward rapidly after a steep climb.
A power pushover can occur on some gyroplanes that have the propeller thrust line above the center of grav- ity and do not have an adequate horizontal stabilizer. In this case, when the rotor is unloaded, the propeller thrust magnifies the pitching moment around the center of gravity. Unless a correction is made, this nose pitching action could become self-sustaining and irreversible. An adequate horizontal stabilizer slows the pitching rate and allows time for recovery.
Since there is some disagreement between manufactur- ers as to the proper recovery procedure for this situation, you must check with the manufacturer of your gyroplane. In most cases, you need to remove power and load the rotor blades. Some manufacturers, especially those with gyroplanes where the propeller thrust line is above the center of gravity, recommend that you need to immediately remove power in order to pre- vent a power pushover situation. Other manufacturers recommend that you first try to load the rotor blades. For the proper positioning of the cyclic when loading up the rotor blades, check with the manufacturer.
When compared to other aircraft, the gyroplane is just as safe and very reliable. The most important factor, as in all aircraft, is pilot proficiency. Proper training and flight experience helps prevent the risks associated with pilot-induced oscillation or buntover.
Ground resonance
Ground resonance is a potentially damaging aerodynamic phenomenon associated with articulated rotor systems. It develops when the rotor blades move out of phase with each other and cause the rotor disc to become unbalanced. If not corrected, ground resonance can cause serious damage in a matter of seconds.
Ground resonance can only occur while the gyroplane is on the ground. If a shock is transmitted to the rotor system, such as with a hard landing on one gear or when operating on rough terrain, one or more of the blades could lag or lead and allow the rotor system’s center of gravity to be displaced from the center of rotation. Subsequent shocks to the other gear aggravate the imbalance causing the rotor center of gravity to rotate around the hub. This phenomenon is not unlike an out- of-balance washing machine. [Figure 21-2]
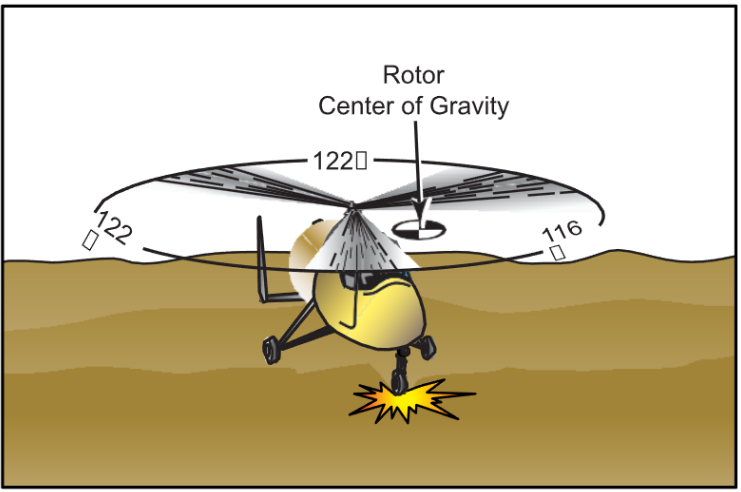
Figure 21-2. Taxiing on rough terrain can send a shock wave to the rotor system, resulting in the blades of a three-bladed rotor system moving from their normal 120° relationship to each other.
To reduce the chance of experiencing ground reso- nance, every preflight should include a check for proper strut inflation, tire pressure, and lag-lead damper operation. Improper strut or tire inflation can change the vibration frequency of the airframe, while improper damper settings change the vibration fre- quency of the rotor.
If you experience ground resonance, and the rotor
r.p.m. is not yet sufficient for flight, apply the rotor brake to maximum and stop the rotor as soon as possible. If ground resonance occurs during takeoff, when rotor r.p.m. is sufficient for flight, lift off immediately. Ground resonance cannot occur in flight, and the rotor blades will automatically realign themselves once the gyroplane is airborne. When prerotating the rotor system prior to takeoff, a slight vibration may be felt that is a very mild form of ground resonance. Should this oscillation amplify, discontinue the prerotation and apply maximum rotor brake.
Emergency approach and landing
The modern engines used for powering gyroplanes are generally very reliable, and an actual mechanical mal- function forcing a landing is not a common occurrence. Failures are possible, which necessitates planning for and practicing emergency approaches and landings. The best way to ensure that important items are not overlooked during an emergency procedure is to use a checklist, if one is available and time permits. Most gyroplanes do not have complex electrical, hydraulic, or pneumatic systems that require lengthy checklists. In these aircraft, the checklist can be easily committed to memory so that immediate action can be taken if needed. In addition, you should always maintain an awareness of your surroundings and be constantly on the alert for suitable emergency landing sites.
When an engine failure occurs at altitude, the first course of action is to adjust the gyroplane’s pitch atti- tude to achieve the best glide speed. This yields the most distance available for a given altitude, which in turn, allows for more possible landing sites. A common mistake when learning emergency procedures is attempting to stretch the glide by raising the nose, which instead results in a steep approach path at a slow airspeed and a high rate of descent. [Figure 21-3] Once you have attained best glide speed, scan the area within gliding distance for a suitable landing site. Remember to look behind the aircraft, as well as in front, making gentle turns, if necessary, to see around the airframe. When selecting a landing site, you must consider the wind direction and speed, the size of the landing site, obstructions to the approach, and the condition of the surface. A site that allows a landing into the wind and has a firm, smooth surface with no obstructions is the most desirable. When considering landing on a road, be alert for powerlines, signs, and automobile traffic. In many cases, an ideal site will not be available, and it will be necessary for you to evaluate your options and choose the best alternative. For example, if a steady wind will allow a touchdown with no ground roll, it may be acceptable to land in a softer field or in a smaller area than would normally be considered. On landing, use short or soft field technique, as appropri- ate, for the site selected. A slightly higher-than-normal approach airspeed may be required to maintain ade- quate airflow over the rudder for proper yaw control.
Emergency equipment and survival gear
On any flight not in the vicinity of an airport, it is highly advisable to prepare a survival kit with items that would be necessary in the event of an emergency. A properly equipped survival kit should be able to provide you with sustenance, shelter, medical care, and a means to summon help without a great deal of effort on your part. An efficient way to organize your survival kit is to prepare a basic core of supplies that would be necessary for any emergency, and allow additional space for supplementary items appropriate for the terrain and weather you expect for a particular flight. The basic items to form the basis of your survival kit would typically include: a first-aid kit and field medical guide, a flashlight, water, a knife, matches, some type of shelter, and a signaling device. Additional items that may be added to meet the conditions, for example, would be a lifevest for a flight over water, or heavy clothing for a flight into cold weather. Another consideration is carrying a cellular phone. Several pilots have been rescued after calling someone to indicate there had been an accident.
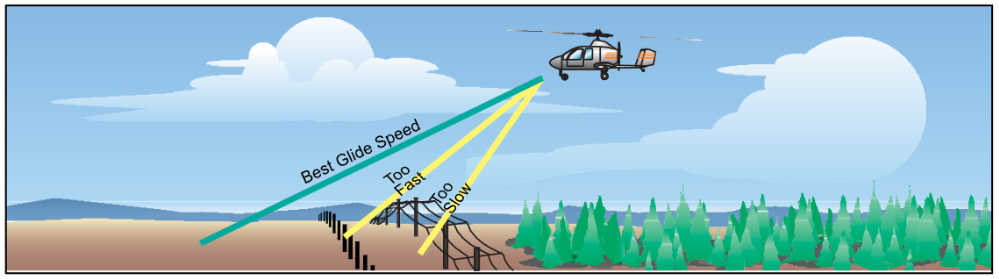
Figure 21-3. Any deviation from best glide speed will reduce the distance you can glide and may cause you to land short of a safe touchdown point.



